Gastón escribió:Los motores asíncronos no son necesariamente adecuados para la tracción.
Su eficiencia es (un poco) más baja, su control es mucho más complejo y su corriente de arranque es muy importante (o si limitamos la corriente de arranque, el par es menor).
De hecho, es el tipo de motor más adecuado (con SRM comenzando a llegar), por lo que hay poco más que eso en trenes, tranvías, metros, barcos, etc.
La dirección es compleja, pero esto no es un problema para la electrónica moderna. Para el SRM, la dirección es aún más compleja, pero el motor es más pequeño, más barato y más eficiente, lo que compensa con creces. La complejidad es principalmente código ... que no cuesta nada en costos de producción, solo en desarrollo. Si reemplaza un kilo de cobre con código, gana dinero. Un DSP más potente para conducir el motor cuesta menos de 500gr de cobre ...
Entonces, para la tracción, lo interesante es la eficiencia, la potencia y el par del motor en todo el rango de velocidad útil y en un amplio rango de carga. Y la relación de todo esto con el precio y el peso.
Es muy diferente de una aplicación como una bomba donde el motor siempre funcionará con una velocidad y carga casi constantes.
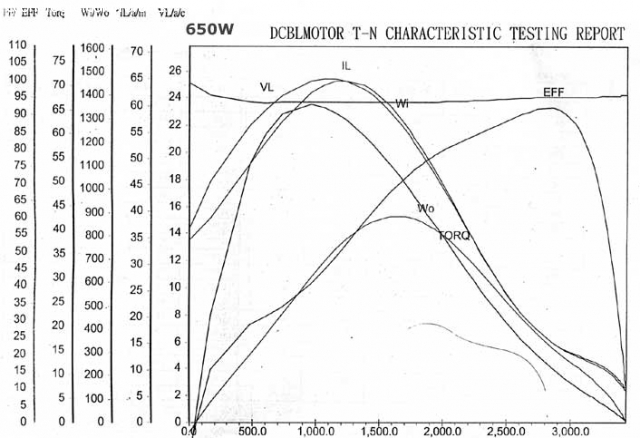
Entonces, el brushless tiene un excelente rendimiento en un pequeño rango de velocidades, fuera de este rango, es una mierda (realmente). Pero la pareja es buena. La extracción de tierras raras (neodimio) genera contaminación apocalíptica, además es costosa.
El asíncrono tiene una eficiencia máxima ligeramente menor, pero sigue siendo bueno en un amplio rango de velocidad, es económico, pero es más pesado y tiene menos torque. Al aumentar la frecuencia, se requieren más engranajes en la salida, pero el motor se vuelve más eficiente.
SRM es un poco asíncrono, solo que mejor: el rotor es un pedazo de chatarra que no cuesta nada, es más liviano, más eficiente y tiene más torque en un rango de velocidad mayor, etc. Pero es nuevo, va a democratizarse.
Lo peor de todo es, por supuesto, el motor de rueda directa sin caja de cambios.
> ¡Los motores asíncronos son mucho más pesados que los motores universales!
El motor universal (es decir, serie sin imán):
- Muy buena relación potencia / peso (para el portátil es esencial)
- muy barato
- Muy buen par de arranque (útil para un taladro)
- rinde más que cagar (50-60% en condiciones óptimas)
- vida útil corta
- sobrecalentamiento rápido (cuando tiene un motor de 0.8kW en su taladro y tiene un 60% de pérdidas, son muchos vatios para evacuar, por lo que debe soplarlo con mucha fuerza ...)
De lo contrario +1 chatelot.



 [/ Url]
[/ Url]

